comp_engineer
Newbie level 5

- Joined
- Mar 23, 2013
- Messages
- 10
- Helped
- 0
- Reputation
- 0
- Reaction score
- 0
- Trophy points
- 1,281
- Activity points
- 1,385
hi everyone
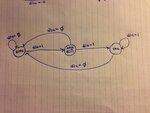
I'm writing a Moore FSM for a rising-edge detector in Verilog HDL. I have essentially written the module but I am not sure as how to transition from the "edge" state to the one state. Please look at the diagram I drew that is attached to this post. Here are my design stipulations:
and here is my Verilog code, perhaps someone can give me a few pointers
The diagram for this circuit is attached to this post. I'd really appreciate any help or assistance anyone here could provide.
I'm writing a Moore FSM for a rising-edge detector in Verilog HDL. I have essentially written the module but I am not sure as how to transition from the "edge" state to the one state. Please look at the diagram I drew that is attached to this post. Here are my design stipulations:
A rising‐edge detector is a circuit that generates a one clock‐cycle pulse every time the input signal din changes from 0 to 1.
The detector also receives the clock signal CLK and a reset signal RESET and generates the output signal pe.
Use zero as the reset state.
and here is my Verilog code, perhaps someone can give me a few pointers
Code:
`define zero 1'b0
`define one 1'b1
module MooreFSM(clk, reset, din, pe);
input clk, reset, din;
output reg pe;
reg out;
reg state;
reg next_state;
always@(posedge clk) begin
if(reset) state = 1'b0; //if there is a reset signal the state goes to state zero
else state = next_state;
end
always@(din or state) begin
case(state)
zero : //last input was a zero
begin
if(din) next_state = pe;
else next_state = 1'b0;
end
one : //we've seen 1
begin
if(din) next_state = 1'b1;
else next_state = 1'b0;
end
endcase
end
/*
always@(state) begin
case(state)
'zero: out =
'Edge: out =
'one : out =
endcase
end
*/
endmoduleThe diagram for this circuit is attached to this post. I'd really appreciate any help or assistance anyone here could provide.