vinodstanur
Advanced Member level 3
- Joined
- Oct 31, 2009
- Messages
- 751
- Helped
- 114
- Reputation
- 234
- Reaction score
- 114
- Trophy points
- 1,333
- Location
- Kerala (INDIA)
- Activity points
- 7,054
Hi,
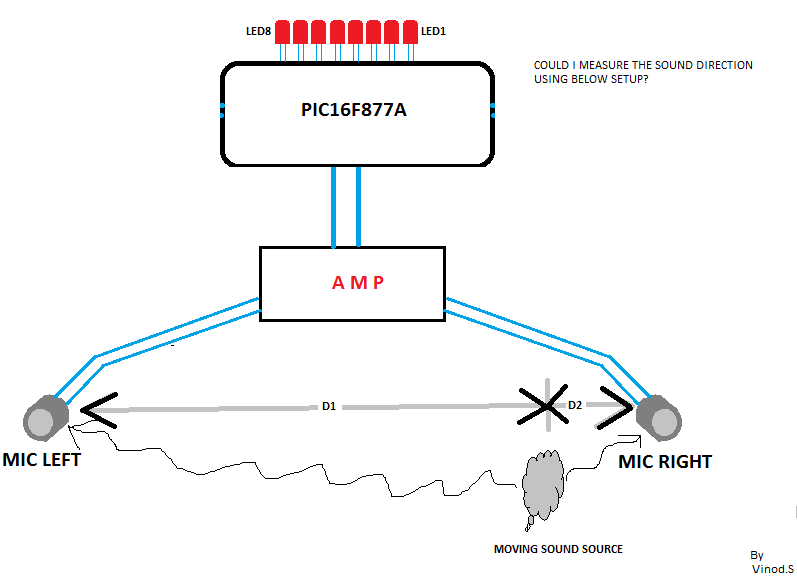
I would like to detect the sound source in 180°..
I had drawn a picture with a small idea..
Here, i assumed a 15cm distance between 2 mics.
So, sound takes more time to reach the right mic if the sound source is near to left mic and vice versa...
But, is it possible to implement this using a PIC16F877A?
If so, pls give me a small algorithm to write a program for this...
I would like to detect the sound source in 180°..
I had drawn a picture with a small idea..
Here, i assumed a 15cm distance between 2 mics.
So, sound takes more time to reach the right mic if the sound source is near to left mic and vice versa...
But, is it possible to implement this using a PIC16F877A?
If so, pls give me a small algorithm to write a program for this...
")