baileychic
Advanced Member level 3
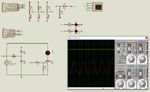
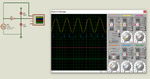
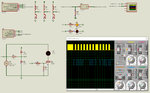
SIRC Decoding not working. What is the problem. Find the attached circuit. This is the code of hexreader. I found this code at libstock and mikroe forum. I modified it for PIC12F683 but decoder is not working.
Transmitter code.
Receiver code.
Transmitter code.
Code C - [expand]
Receiver code.
Code C - [expand]

")