SparkyChem
Member level 3
- Joined
- Apr 22, 2010
- Messages
- 57
- Helped
- 0
- Reputation
- 0
- Reaction score
- 0
- Trophy points
- 1,286
- Location
- Lima, Peru
- Activity points
- 2,084
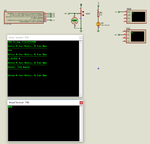
I am trying to make a simple project in mikrobasic using PIC12F1840. This includes to toggle on and off a led in Port RA0 at a frequency of 1Hz (led blinking), at the same time recording ADC values from a potentiometer from 0 to 5v max in Port RA1 at 10 bits and simultaneously sending those values to the computer via RS232 to be read through hyperterminal.
However before showing the results the pic would ask the user if the desired value would be between 0 to 1023 or 0 to 4.999 v, in other words asking the user which unit desires. I understand that the way to achieve this is using timer interrupts however i don't know how to use these in mikrobasic, mind anyone sharing a code or an example on how do i solve this problem?. Thanks.
However before showing the results the pic would ask the user if the desired value would be between 0 to 1023 or 0 to 4.999 v, in other words asking the user which unit desires. I understand that the way to achieve this is using timer interrupts however i don't know how to use these in mikrobasic, mind anyone sharing a code or an example on how do i solve this problem?. Thanks.
 ammed !
ammed !