mobinmk
Full Member level 2
- Joined
- May 27, 2010
- Messages
- 140
- Helped
- 4
- Reputation
- 8
- Reaction score
- 4
- Trophy points
- 1,298
- Location
- Kollam (Quilon),kerala, India
- Activity points
- 2,484
hi frnds
i wan to make v/f control of 3phase acim
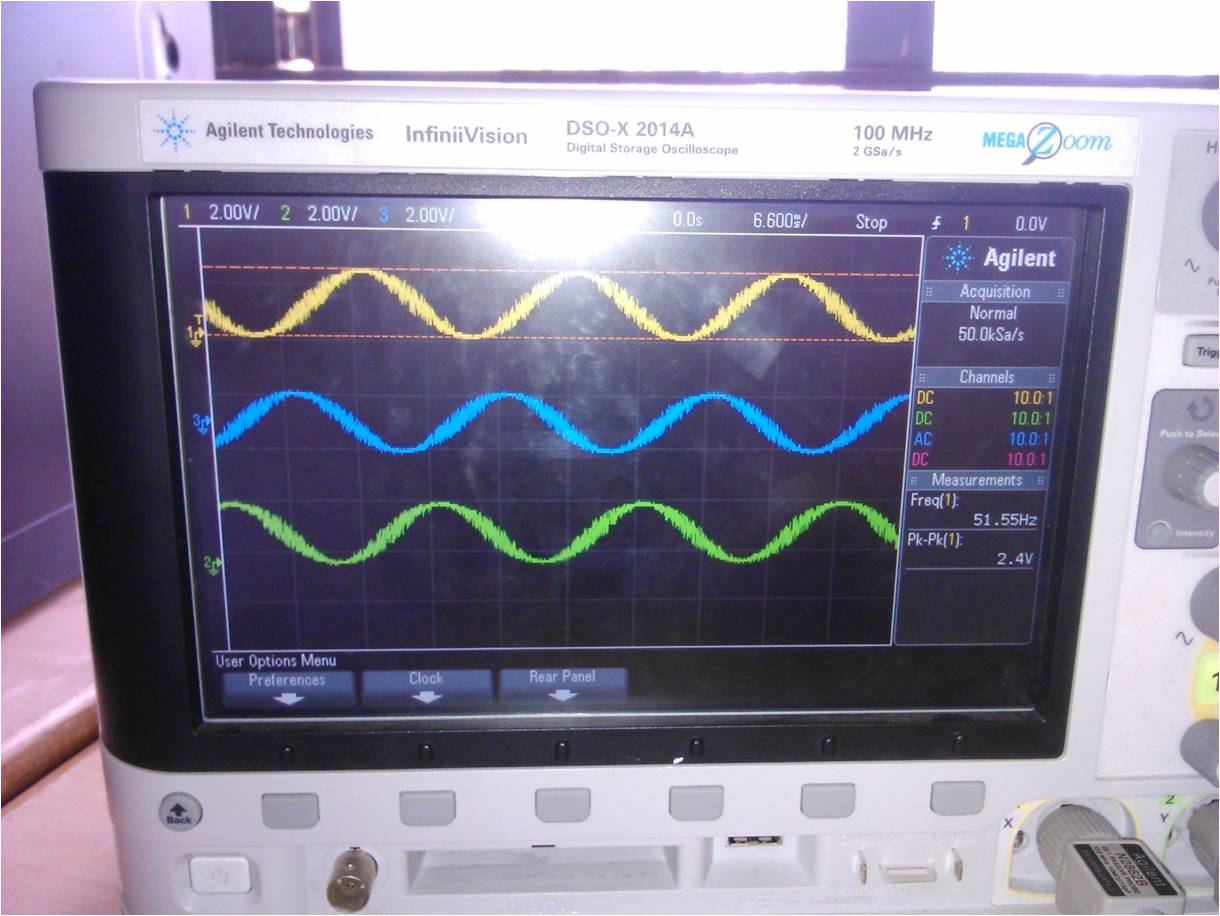
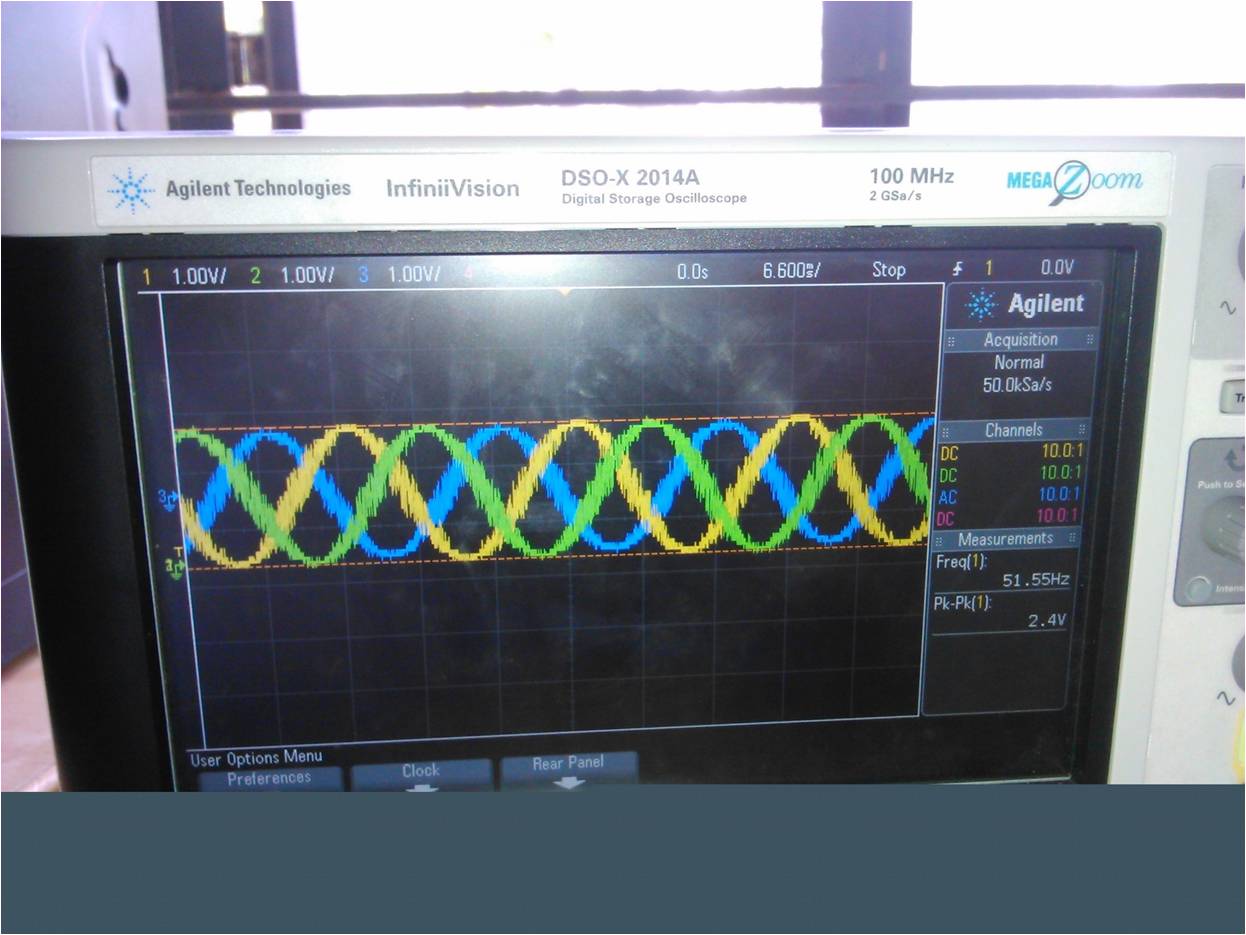
successfuly i generate 3 phase sine wave, which frequency can vary frm 1hz to 1023hz
using 3 phase DDS by sine lookup table, timer,interrupt.
now i wana to implement V/F
i attached my program
pls share your knowledgzzz...
regards
mobin
i wan to make v/f control of 3phase acim
successfuly i generate 3 phase sine wave, which frequency can vary frm 1hz to 1023hz
using 3 phase DDS by sine lookup table, timer,interrupt.
now i wana to implement V/F
i attached my program
Code C - [expand]
pls share your knowledgzzz...
regards
mobin
Last edited by a moderator: