anotherbrick
Full Member level 4
- Joined
- Jan 10, 2009
- Messages
- 217
- Helped
- 1
- Reputation
- 2
- Reaction score
- 1
- Trophy points
- 1,298
- Location
- Istanbul , Turkey
- Activity points
- 3,142
hello forum
I have a 200 W 24 V DC motor
this motor is driving the accu wheelchair of handicapped person
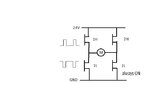
I have built an H bridge with which I PWM the motor for speed control
everything is fine when I PWM the motor ( i.e. when the motor is "motoring" )
however when I lower the PWM level to a lower speed the motor is freewheeling until the wheelchair inertia ( total load of wheelchair and person) is zero and just after that it is motoring with the new PWM value - and this takes about 2 - 3 second which is not wanted by the user
I mean it is not braking ( "generating" )
I want ask why the motor is not braking ( generating ) when I lower the PWM level ?
( I PWM the high side and low side mosfet is fully on )
I have a 200 W 24 V DC motor
this motor is driving the accu wheelchair of handicapped person
I have built an H bridge with which I PWM the motor for speed control
everything is fine when I PWM the motor ( i.e. when the motor is "motoring" )
however when I lower the PWM level to a lower speed the motor is freewheeling until the wheelchair inertia ( total load of wheelchair and person) is zero and just after that it is motoring with the new PWM value - and this takes about 2 - 3 second which is not wanted by the user
I mean it is not braking ( "generating" )
I want ask why the motor is not braking ( generating ) when I lower the PWM level ?
( I PWM the high side and low side mosfet is fully on )


")