grantwr
Newbie level 3
Hi all
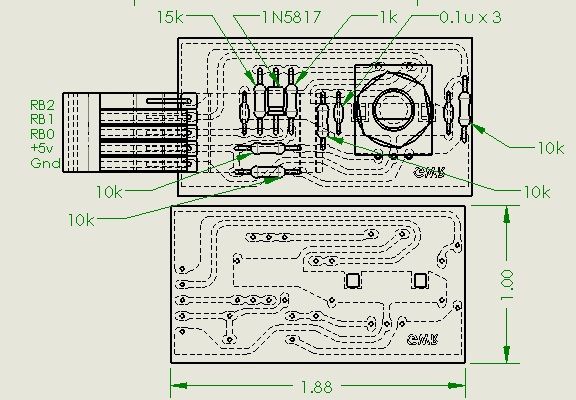
brand new here and really looking for some help. I cant seem to get the pic to respond to an external interupt on pins RB0/Int0, RB1/Int1 or RB2/Int2. The circuit works and displays an initial value on the 7 segment display but an interupt will not cause a change.
To elimenate circuit problems i have stripped it down to just a 1k resistor shorting ground to any one of the input pins. (weak pull ups are enabled).
The main parts of the code are:
The pic runs and displays '20' (0x14) but nothing will change it. It was initially to be driven from a rotary encoder but i have gradually stripped everything away to try to find the problem without success.
other releveant info - 1st project with PIC18F, 4th project total, 16f84 & 16f628, only familiar with assembly code.
can anyone see where i am going wrong?
thanks
grantwr
brand new here and really looking for some help. I cant seem to get the pic to respond to an external interupt on pins RB0/Int0, RB1/Int1 or RB2/Int2. The circuit works and displays an initial value on the 7 segment display but an interupt will not cause a change.
To elimenate circuit problems i have stripped it down to just a 1k resistor shorting ground to any one of the input pins. (weak pull ups are enabled).
The main parts of the code are:
Code ASM - [expand]
The pic runs and displays '20' (0x14) but nothing will change it. It was initially to be driven from a rotary encoder but i have gradually stripped everything away to try to find the problem without success.
other releveant info - 1st project with PIC18F, 4th project total, 16f84 & 16f628, only familiar with assembly code.
can anyone see where i am going wrong?
thanks
grantwr
Last edited by a moderator: