sk8ter87
Member level 3
Hi there..
I am student from Malaysia..
Currently i'm doing my final year project with my partner about wifi spy robot..
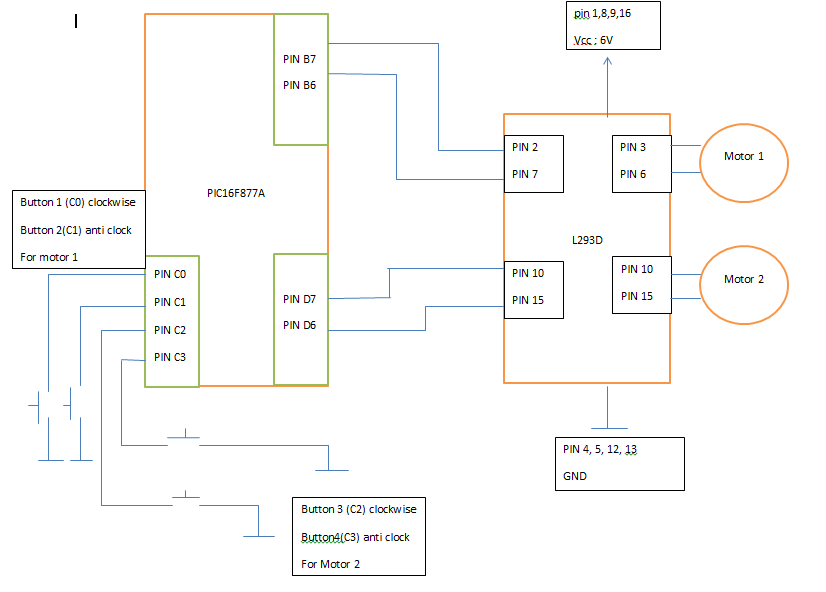
we manage to construct the circuit and do the pic programming..(PIC16F877A)
our problem is that the voltage from pic to the l293d(motor driver) is very low..we getting 1v instead of 3v..
Hope you guyz can help us on how to overcome this problem..
Thanks
I am student from Malaysia..
Currently i'm doing my final year project with my partner about wifi spy robot..
we manage to construct the circuit and do the pic programming..(PIC16F877A)
our problem is that the voltage from pic to the l293d(motor driver) is very low..we getting 1v instead of 3v..
Hope you guyz can help us on how to overcome this problem..
Thanks