jerkymotion
Member level 4
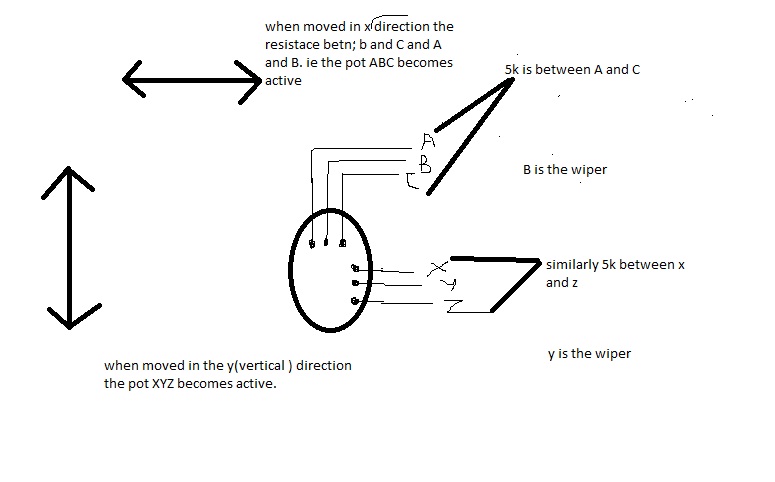
hi all i need to drive a motor using joystick(gamepad) having the analog. I have attached the joypad picture also.. i have posted the internal schematic of the analog part also(internal block structure of joystick's analog)...I have driven motor using joypad's analog in both the direction using microcontroller....but now i need to drive without microcontroller..
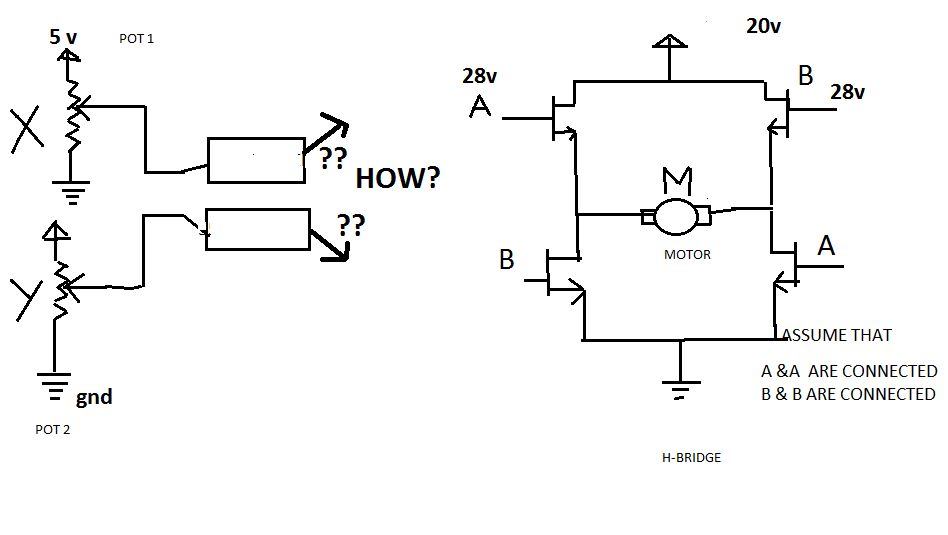
i need to drive motor in one direction when i play the joypad's analog in one direction let us say Y direction.....and in another direction when i play the joypad's analog in another direction let us say X-direction.....
can you please suggest any ideas regarding this....i am waek at circuit design..


i need to drive motor in one direction when i play the joypad's analog in one direction let us say Y direction.....and in another direction when i play the joypad's analog in another direction let us say X-direction.....
can you please suggest any ideas regarding this....i am waek at circuit design..