LeoStar
Member level 2
Hello Everyone!
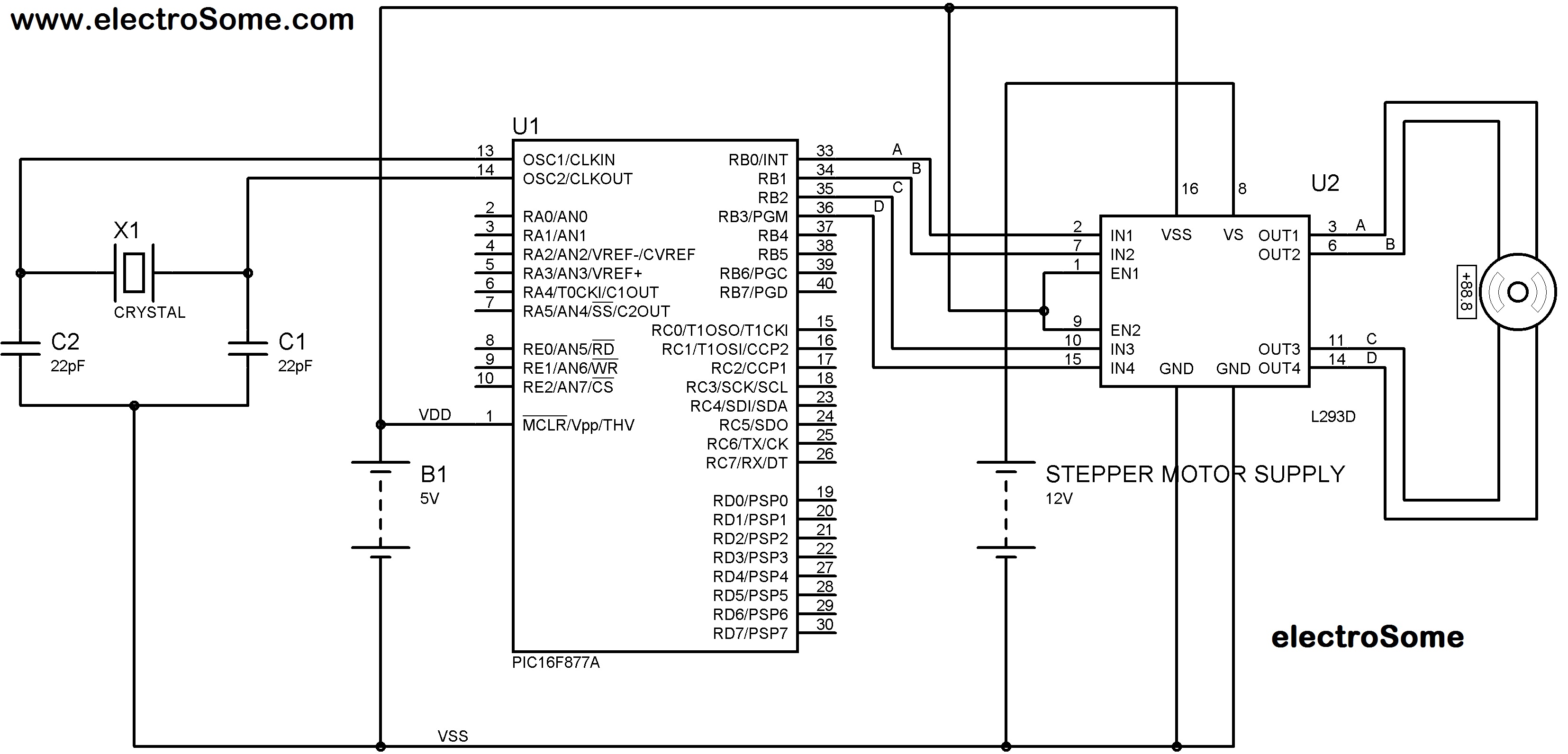
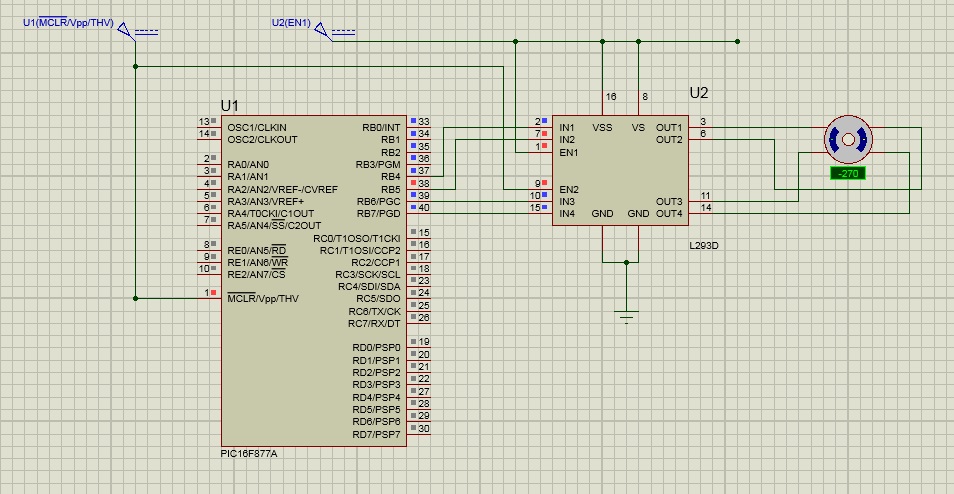
This time I am trying to work with a bipolar stepper motor. I have interfaced it to the PORT B of PIC16F877A through a L293DNE chip in the middle.
I am trying to rotate in the clockwise as well as anticlockwise direction. Twice in each direction actually, the problem is it doesn't work as it should. It just keeps jostling in both the directions. That is it gives one jerk in the clockwise direction ,not a step, and the other in the reverse direction.
It worked for a while before. We increased the no of iterations and it started this erratic behavior again.
I am using a 9V battery for the controller and a 12V battery for the motor.
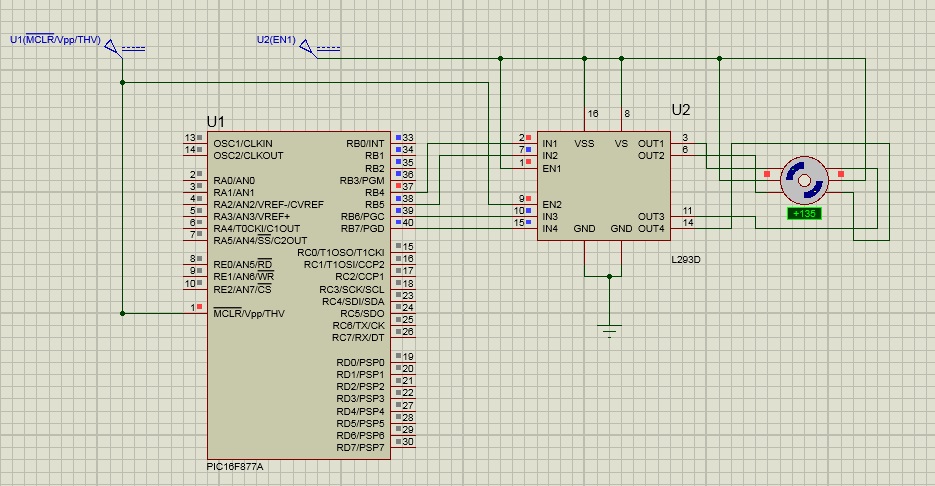
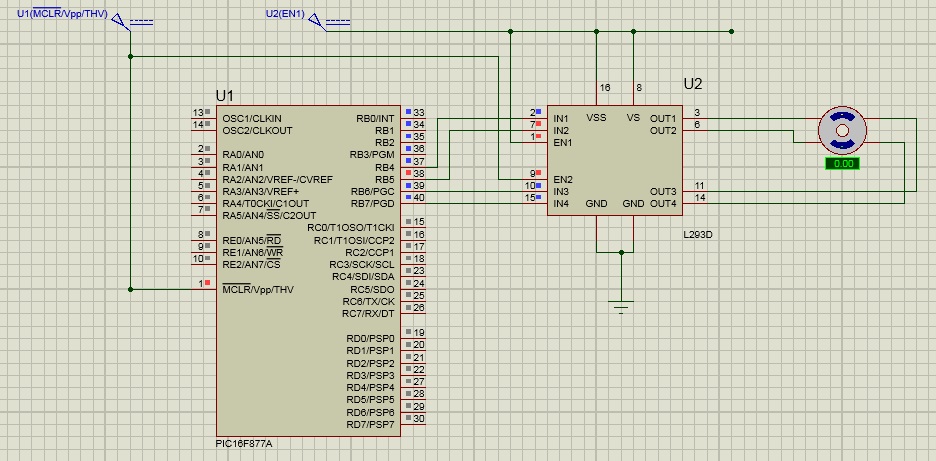
Everything is fine with the circuit, I have tried everything on Proteus which shows the expected ideal behavior but the hardware doesn't.
Help is direly needed as I have to submit this project by tomorrow and everything depends on the working of the motor.
Thanks in advance. Waiting eagerly for HELP!
This time I am trying to work with a bipolar stepper motor. I have interfaced it to the PORT B of PIC16F877A through a L293DNE chip in the middle.
I am trying to rotate in the clockwise as well as anticlockwise direction. Twice in each direction actually, the problem is it doesn't work as it should. It just keeps jostling in both the directions. That is it gives one jerk in the clockwise direction ,not a step, and the other in the reverse direction.
It worked for a while before. We increased the no of iterations and it started this erratic behavior again.
I am using a 9V battery for the controller and a 12V battery for the motor.
Everything is fine with the circuit, I have tried everything on Proteus which shows the expected ideal behavior but the hardware doesn't.
Help is direly needed as I have to submit this project by tomorrow and everything depends on the working of the motor.
Thanks in advance. Waiting eagerly for HELP!