chandresha1
Member level 2
- Joined
- Dec 4, 2010
- Messages
- 43
- Helped
- 3
- Reputation
- 6
- Reaction score
- 3
- Trophy points
- 1,288
- Location
- Bremen, Germany
- Activity points
- 1,673
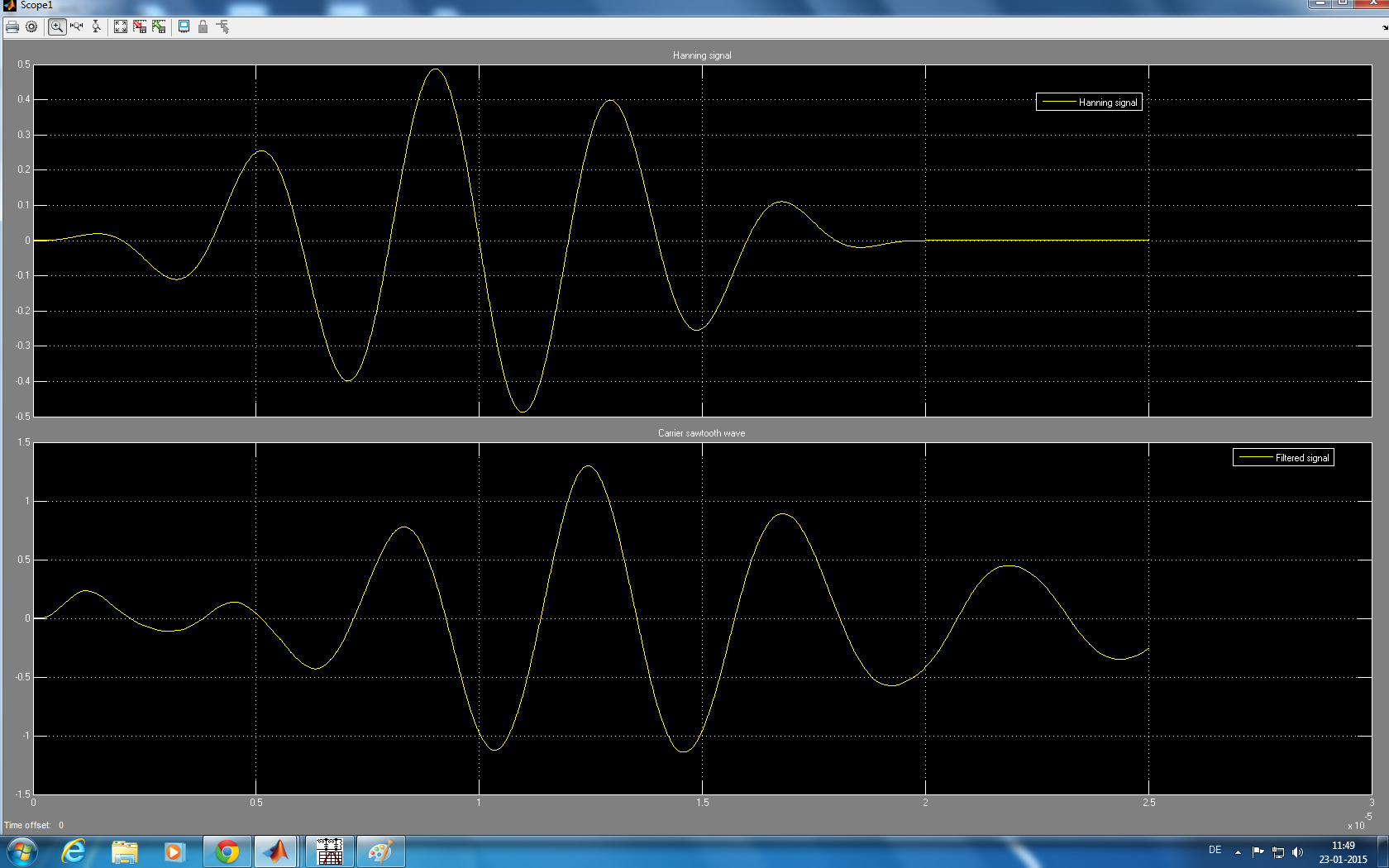
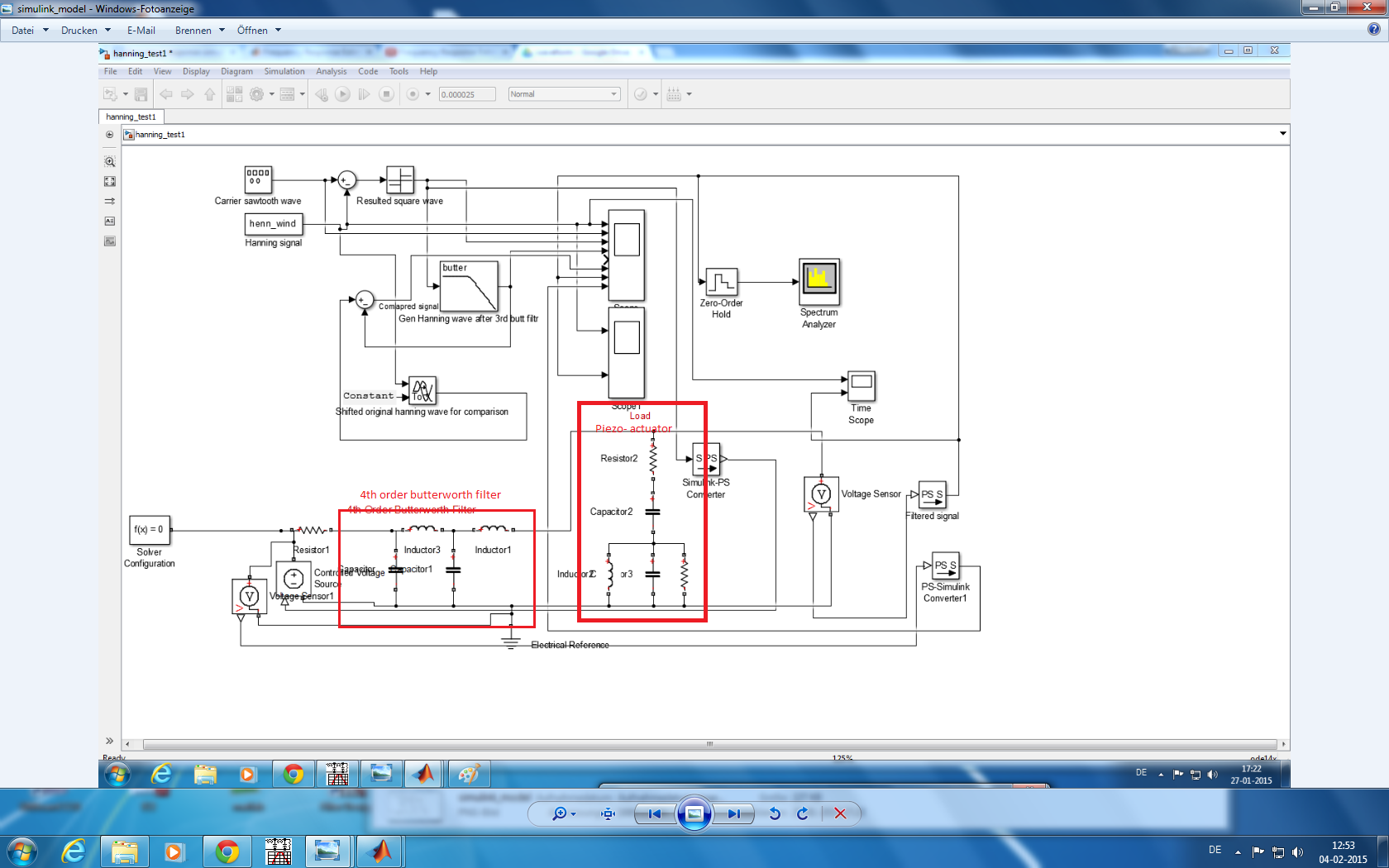
I am designing a passive analog filter for Digital to analog conversion. But i am stuck at one point. My load is not purely resistive. Actually i have to drive a piezo with my circuit. Piezo is an inductive and capacitive load. I don't have any idea about how to design filter for such kind of load. Could anyone tell me the possible method or some kind of tutorial?