tankerpacific
Newbie level 5
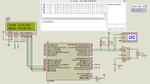
Can anybody help me out with interfacing DS1307 with PIC microcontroller?
I tried it but not getting clock at all on SCl pin.
I have used 1.2k pull ups on both SCL and SDA.
I am using XC8 compiler and MSSP module to achieve I2C.
I have sent 00 to register 0 that is for seconds as weel as 7th bit for CH.
I tried it but not getting clock at all on SCl pin.
I have used 1.2k pull ups on both SCL and SDA.
I am using XC8 compiler and MSSP module to achieve I2C.
I have sent 00 to register 0 that is for seconds as weel as 7th bit for CH.