programmer36
Newbie level 5
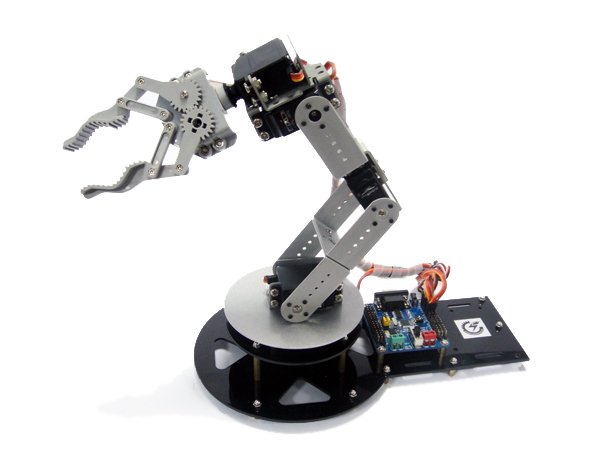
Hi as per topic, im trying to make a robot with Microchip PIC16F877A with 5DOF.
This will be my first robot and in fact first time playing with servo motor.
It came to my mind if it possible to control robotic arm with this PIC? Should I get a different PIC?
Im still in the research stage, any inputs/help/ideas/future challenges/comments pls share.
Thanks alot forummers.:grin:
This will be my first robot and in fact first time playing with servo motor.
It came to my mind if it possible to control robotic arm with this PIC? Should I get a different PIC?
Im still in the research stage, any inputs/help/ideas/future challenges/comments pls share.
Thanks alot forummers.:grin: