vaka85
Advanced Member level 4
Hi all,
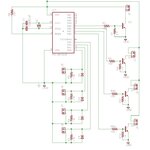
I've done a project with pic16f628a, it is very simple, since I'm a beginner in programming...
It takes 4 piezo buzzers as inputs, and when they provide a pulse, a led turns on at the corresponding output.
The problem is that everything is without interrupts, so there are some problem with the polling:
if the input pulse are fast (for example 2 o 3 per second), and almost at the same time between the inputs, a lot of pulses are "lost". The biggest problem occures when there are 2 very close pulses between two different inputs; in this case one of the two outputs almost always doesn't turn on.
That's why I'd like to use interrupts. But looking at the 628 datasheet it seems that there is only one input available for interrupts.
So, here is the question, could you tell me a good (and cheap) alternative to the 628?
I need at least 4 inputs(everyone usable with interrupts), but the more the better!
Thank you
I've done a project with pic16f628a, it is very simple, since I'm a beginner in programming...
It takes 4 piezo buzzers as inputs, and when they provide a pulse, a led turns on at the corresponding output.
The problem is that everything is without interrupts, so there are some problem with the polling:
if the input pulse are fast (for example 2 o 3 per second), and almost at the same time between the inputs, a lot of pulses are "lost". The biggest problem occures when there are 2 very close pulses between two different inputs; in this case one of the two outputs almost always doesn't turn on.
That's why I'd like to use interrupts. But looking at the 628 datasheet it seems that there is only one input available for interrupts.
So, here is the question, could you tell me a good (and cheap) alternative to the 628?
I need at least 4 inputs(everyone usable with interrupts), but the more the better!
Thank you
") but I'd like to use pic so I can learn something...
but I'd like to use pic so I can learn something...