sadeqali90
Newbie level 3
I am in need for your help and it really appreciated .I hope you can help me and reduce my headache with PID controller
Hello and I hope you are doing good there,
Actually I am I doing my final year project with title “ LINE FOLLOWER ROBOT BASED ON PID CONTROLLER” and I need to apply PID controller using trial and error method .
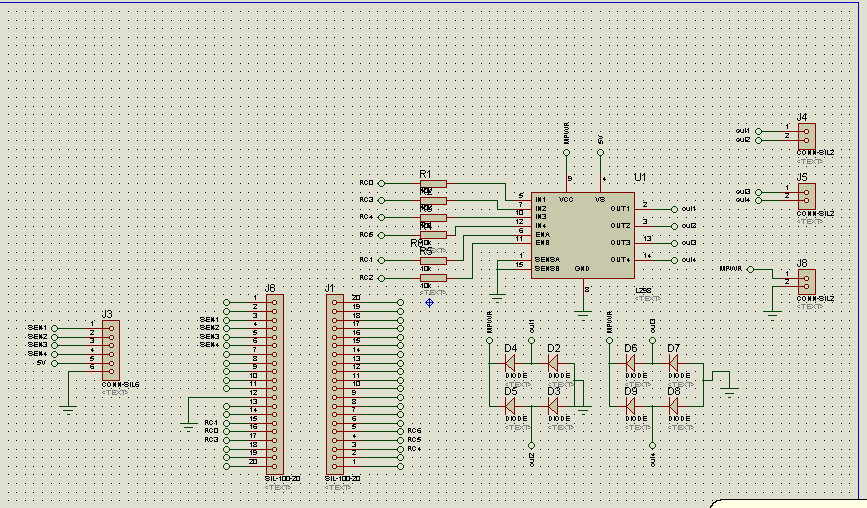
I am using PIC 16f877A microcontroller . The input for this PIC16f877A come from four array Infared senors (analog input ) .The infared sensor are connected directly to the PIC16f877A through PORTA (pins RA3,RA4,RA5 and RA6) while the PIC is connected to the circuit driver through the port C with pins ( RC0, RC1, RC2 , RC3, RC5, RC6). The IC used for the circuit driver is L298N which is connected to the two dc gear motors.
Sechmatic are below
Note!!!!!!!
I don’t know how to convert the pid algorthem to c programming coding in order for the robot to follow the line . Below are some codings for the PID controller (proportional , integral , derivative )
******** I need you help guys , I have really suffered *************** please help
Hello and I hope you are doing good there,
Actually I am I doing my final year project with title “ LINE FOLLOWER ROBOT BASED ON PID CONTROLLER” and I need to apply PID controller using trial and error method .
I am using PIC 16f877A microcontroller . The input for this PIC16f877A come from four array Infared senors (analog input ) .The infared sensor are connected directly to the PIC16f877A through PORTA (pins RA3,RA4,RA5 and RA6) while the PIC is connected to the circuit driver through the port C with pins ( RC0, RC1, RC2 , RC3, RC5, RC6). The IC used for the circuit driver is L298N which is connected to the two dc gear motors.
Sechmatic are below
Note!!!!!!!
I don’t know how to convert the pid algorthem to c programming coding in order for the robot to follow the line . Below are some codings for the PID controller (proportional , integral , derivative )
Code C - [expand]
******** I need you help guys , I have really suffered *************** please help
Last edited by a moderator: