engineerme
Junior Member level 1
- Joined
- Apr 4, 2012
- Messages
- 16
- Helped
- 0
- Reputation
- 0
- Reaction score
- 0
- Trophy points
- 1,281
- Location
- North east uk
- Activity points
- 1,431
Hi, after previous help from a few very helpful members on edaboard (FvM and LvW) i have now got to a point that i am finding confusing. I have a circuit:

The gain at R6 was from an inital gain of 20db which produced a gain margin of -7.6756dB as shown in the AC analysis :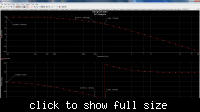
So gain required was 27.6756dB for stability, and into voltage gain = 24.198 (as shown in R6 against R5). By placing the voltage gain at R6 i produced an AC image that did not match up with -180 degrees.
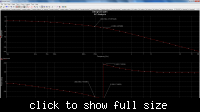
Could anybody suggest what might be going wrong with my approach?

The gain at R6 was from an inital gain of 20db which produced a gain margin of -7.6756dB as shown in the AC analysis :

So gain required was 27.6756dB for stability, and into voltage gain = 24.198 (as shown in R6 against R5). By placing the voltage gain at R6 i produced an AC image that did not match up with -180 degrees.

Could anybody suggest what might be going wrong with my approach?



