Vermes
Advanced Member level 4
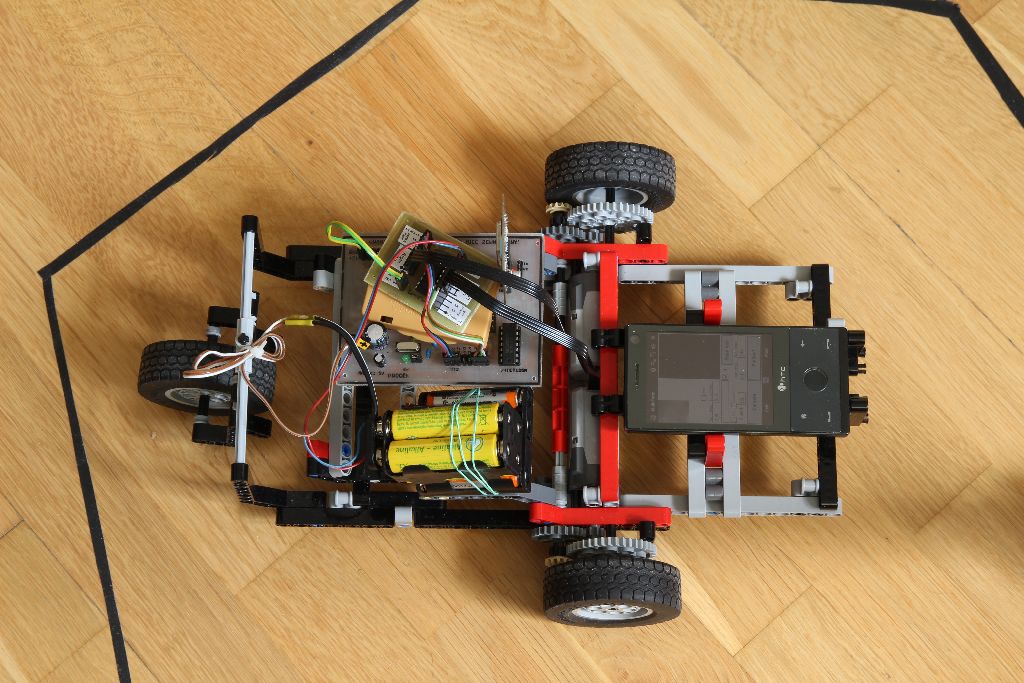
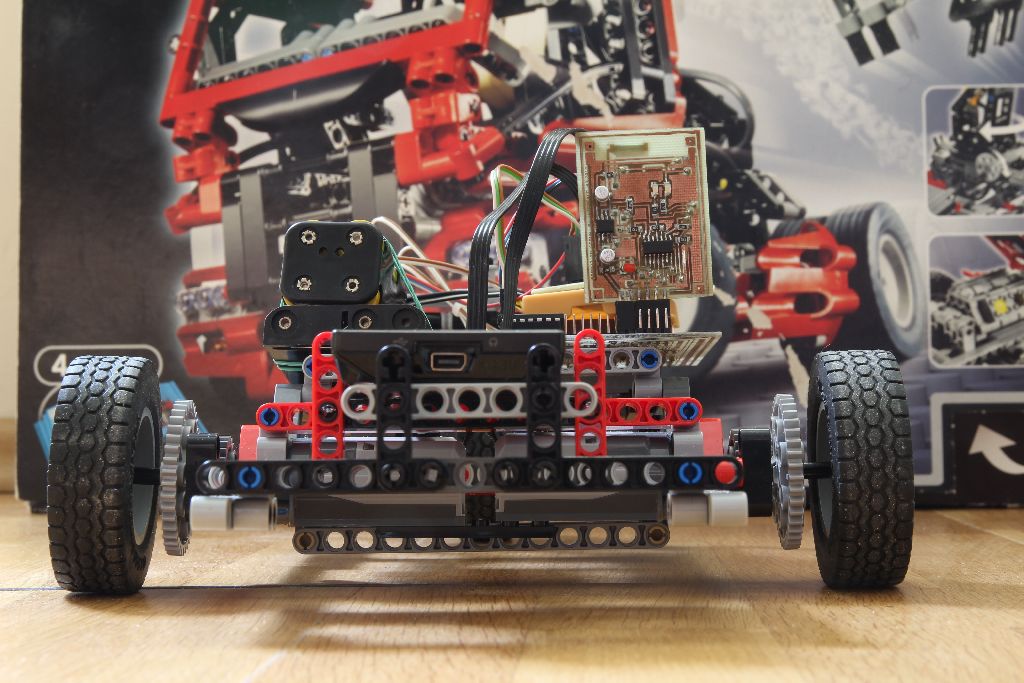
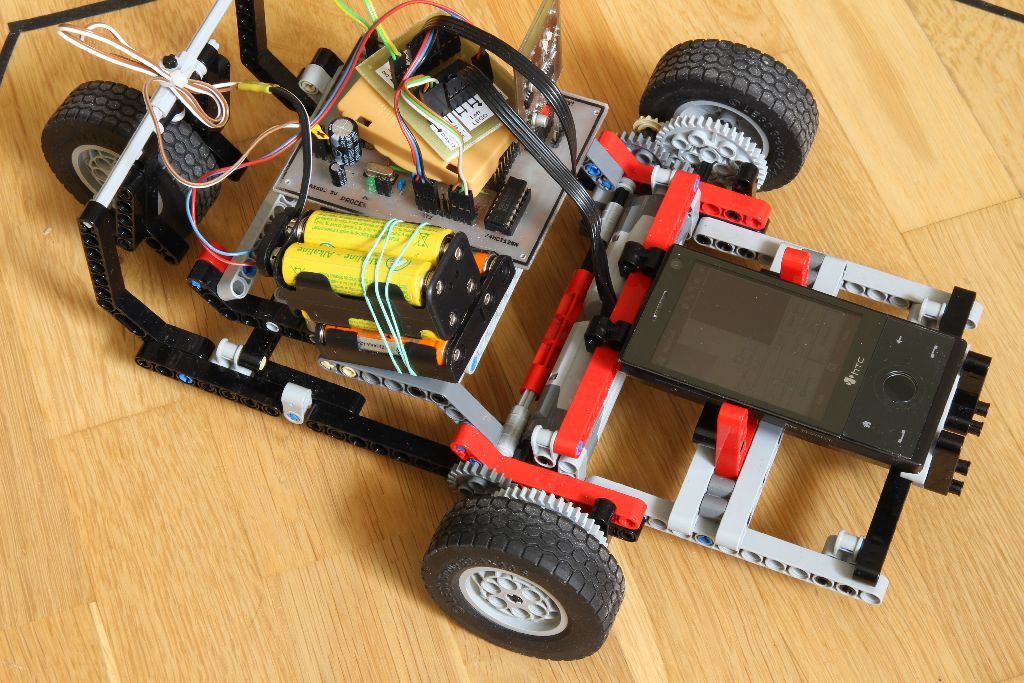
The construction consists of the following components:
- a robot made of LEGO bricks Technics (using electric motors, Power Function series)
- electronics system: DS89c450, module BTM222, L29D to control the motors, MAX603/604 to the voltage regulation
- phone HTC Diamond, which camera is used to analyze the path
- phone lays on the robot and takes pictures of the underside
- analyzes the image and sends it through BT commands to the system
- DS89c450 receives commands (RS232 via BTM222) and sets the proper fulfillment on the pins that control the motors (PWM programmable implemented using a timer)
The whole is powered from two sources: -4 x AA battery for engines and 9V battery for the system.
Link to original thread (video) – Snake follower (aka Line Follower)