abc_de
Full Member level 5
- Joined
- Jan 9, 2014
- Messages
- 243
- Helped
- 11
- Reputation
- 22
- Reaction score
- 11
- Trophy points
- 1,298
- Location
- Ludhiana ਪੰਜਾਬ
- Activity points
- 2,939
Hello
i want to control the speed of my DC Brushed Motor
Ratings are given below:
voltage: 31 v
amperes: 3.8 amp
Watt: 80
i have not work on DC motor control. please suggest me driver circuit,switching Modulation and other consideration things.
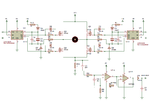
i am following Microchip AN893 app notes.
i want to control the speed of my DC Brushed Motor
Ratings are given below:
voltage: 31 v
amperes: 3.8 amp
Watt: 80
i have not work on DC motor control. please suggest me driver circuit,switching Modulation and other consideration things.
i am following Microchip AN893 app notes.
Last edited: