Jscheel66
Newbie level 5
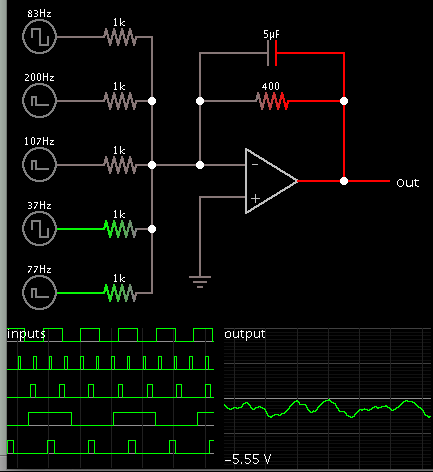
I have a question about the design of a circuit to determine direction using multiple inputs. Like 5 inputs are coming in, going high, high, low, high, high, low. Moving in a given direction to fast to see with the human eye. I think I only need 3 signal inputs to determine direction but I can have many...
I believe it should be possible to solve this with a flip flop or comparator circuit..
I need advice please. Any advice will be greatly appreciated.
Jeff
I believe it should be possible to solve this with a flip flop or comparator circuit..
I need advice please. Any advice will be greatly appreciated.
Jeff
") and everyone else.....
and everyone else.....